DEA Surface Reflectance OA (Landsat 9)
DEA Surface Reflectance OA (Landsat 9)
- Version:
- Type:
Baseline, Raster
- Resolution:
15-30 m
- Coverage:
31 Oct 2021 to Present
- Data updates:
Daily frequency, Ongoing
About
DEA Surface Reflectance Observation Attributes (OA) (Landsat 9) is part of a suite of Digital Earth Australia (DEA)’s Surface Reflectance datasets that represent the vast archive of images captured by the US Geological Survey (USGS) Landsat and European Space Agency (ESA) Sentinel-2 satellite programs, validated, calibrated, and adjusted for Australian conditions — ready for easy analysis.
Access the data
For help accessing the data, see the Access tab.
Key specifications
For more specifications, see the Specifications tab.
Technical name |
Geoscience Australia Landsat 9 OLI-TIRS Observation Attributes Collection 3 |
Bands |
|
DOI |
|
Currency |
|
Collection |
|
Licence |
Cite this product
Data citation |
Alam, I., Chopra, A., Gray, D., Hooke, J., Li, F., Ly, L., Mettes, J., Miller, J., Norton, A., OHehir, A. 2023. Geoscience Australia Landsat 9 OLI TIRS Analysis Ready Data Collection 3. Geoscience Australia, Canberra. https://dx.doi.org/10.26186/148693
|
Background
This is a sub-product of DEA Surface Reflectance (Landsat 9). See the parent product for more information.
The contextual information related to a dataset is just as valuable as the data itself. This information, also known as data provenance or data lineage, includes details such as the data’s origins, derivations, methodology and processes. It allows the data to be replicated and increases the reliability of derivative applications.
Data that is well-labelled and rich in spectral, spatial and temporal attribution can allow users to investigate patterns through space and time. Users are able to gain a deeper understanding of the data environment, which could potentially pave the way for future forecasting and early warning systems.
The surface reflectance data produced by NBAR* and NBART** requires accurate and reliable data provenance. Attribution labels, such as the location of cloud and cloud shadow pixels, can be used to mask out these particular features from the surface reflectance analysis, or used as training data for machine learning algorithms. Additionally, the capacity to automatically exclude or include pre-identified pixels could assist with emerging multi-temporal and machine learning analysis techniques.
* Nadir corrected Bi-directional reflectance distribution function Adjusted Reflectance (NBAR)
** Nadir corrected Bi-directional reflectance distribution function Adjusted Reflectance with terrain illumination correction (NBART)
What this product offers
This product contains a range of pixel-level observation attributes (OA) derived from satellite observation, providing rich data provenance:
null pixels
clear pixels
cloud pixels
cloud shadow pixels
snow pixels
water pixels
spectrally contiguous pixels
terrain shaded pixels.
It also features the following pixel-level information pertaining to satellite, solar and sensing geometries:
solar zenith
solar azimuth
satellite view
incident angle
exiting angle
azimuthal incident
azimuthal exiting
relative azimuth
timedelta.
Technical information
How observation attributes can be used
This product provides pixel- and acquisition-level information that can be used in a variety of services and applications. This information includes:
data provenance, which:
denotes which inputs/parameters were used in running the algorithm
demonstrates how a particular result was achieved
can be used as evidence for the reasoning behind particular decisions
enables traceability
training data for input into machine learning algorithms, or additional likelihood metrics for image feature content, where pre-classified content includes:
cloud
cloud shadow
snow
water
additional pixel filtering (e.g. exclude pixels with high incident angles)
pre-analysis filtering based on image content (e.g. return acquisitions that have less than 10% cloud coverage)
input into temporal statistical summaries to produce probability estimates on classification likelihood
This product allows you to screen your data for undesired anomalies that can occur during any phase: from the satellite’s acquisition, to the processing of surface reflectance, which relies on various auxiliary sources each having their own anomalies and limitations.
Pixel-level information on satellite and solar geometries is useful if you wish to exclude pixels that might be deemed questionable based on their angular measure. This is especially useful if you are using the NBAR product, where pixels located on sloping surfaces can exhibit a lower than expected surface reflectance due to a higher incidence or solar zenith angle.
Example - Terrain shadow and high incident angles
These images depict an area containing high topographic relief, terrain shadow, and high incident angles. Applications, such as water classification, can mis-classify dark regions as water due to the effect of high incident angles in regions of high topographic relief.
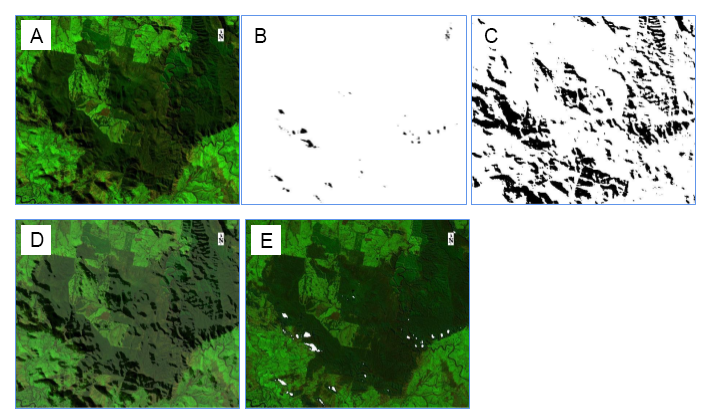
Figure 1. (A) Surface Reflectance (Landsat 5 TM NBAR) image; (B) terrain shadow mask; (C) high incident angle mask (>65); (D) NBAR+ mask overlay; (E) equivalent Surface Reflectance (Landsat 5 TM NBART) image.
Terminology for satellite, solar and sensing geometries
Zenith The point in the sky or celestial sphere directly above a point of interest (in this case, the point being imaged on Earth).
Solar zenith (degrees) The angle between the zenith and the centre of the sun’s disc.
Solar azimuth (degrees) The angle of the sun’s position from true north; i.e. the angle between true north and a vertical circle passing through the sun and the point being imaged on Earth.
Satellite view or satellite zenith (degrees) The angle between the zenith and the satellite.
Satellite azimuth (degrees) The angle of the satellite’s position from true north; i.e. the angle between true north and a vertical circle passing through the satellite and the point being imaged on Earth.
Incident angle (degrees) The angle between a ray incident on a surface and the line perpendicular to the surface at the point of incidence.
Exiting angle (degrees) The angle between a ray reflected from a surface and the line perpendicular to the surface at the point of emergence.
Azimuthal incident (degrees) The angle between true north and the incident direction in the slope geometry.
Azimuthal exiting (degrees) The angle between true north and the exiting direction in the slope geometry.
Relative azimuth (degrees) The relative azimuth angle between the sun and view directions.
Relative slope (degrees) The relative azimuth angle between the incident and exiting directions in the slope geometry.
Timedelta (seconds) The time from satellite apogee (the point of orbit at which the satellite is furthest from the Earth).
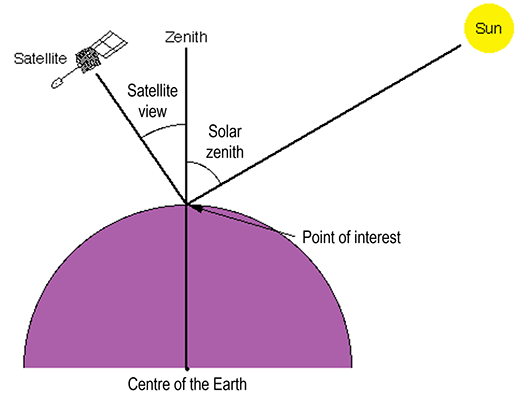
Figure 2. Zenith angles. Image modified from Support to Aviation Control Service (2011).
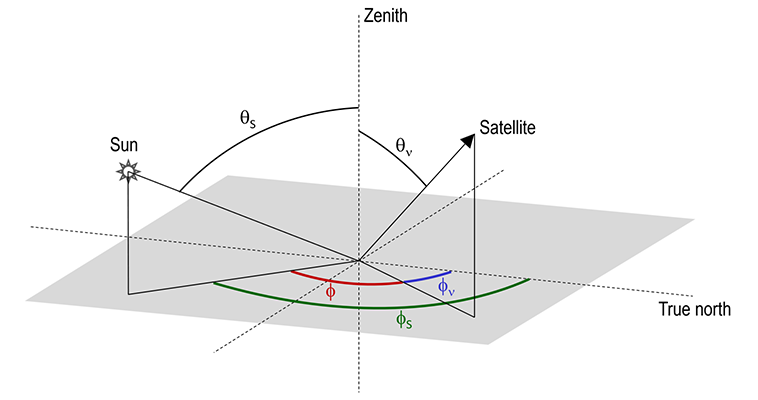
Figure 3. Zenith and azimuth angles. θs = solar zenith; θν = satellite view; Φs = solar azimuth (green); Φν = satellite azimuth (blue); Φ = relative azimuth (red). Image modified from Hudson et al. (2006).
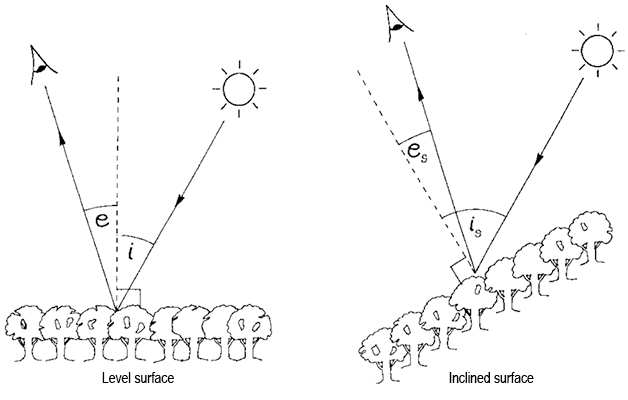
Figure 4. Incident (i) and exiting (e) angles for a level and inclined surface. Image modified from Dymond and Shepherd (1999).
The Fmask algorithm
Fmask allows you to have pre-classified image content for use within their applications. This can include:
additional confidence metrics in image content classifiers
pre-labelled data for machine learning classifiers
pixel screening for cloud and cloud shadow
on-the-fly mapping applications for water and snow.
The result of the Fmask algorithm contains mutually exclusive classified pixels, and the numerical schema for the pixels are as follows:
0 = null
1 = clear
2 = cloud
3 = cloud shadow
4 = snow
5 = water.
The spectrally contiguous pixels which have a valid observation in each spectral band. This is particularly useful for applications undertaking band math, as it allows non-contiguous data to be ignored during the band math evaluation or masked during post-evaluation. The product can be utilised as a strict mask, and the numerical schema for the pixels are as follows:
0 = non-contiguous
1 = contiguous.
The terrain-shaded pixels product can be utilised as a strict mask and exclude pixels that were unobservable by the sun or sensor. The numerical schema for the pixels are as follows:
0 = shaded
1 = not shaded.
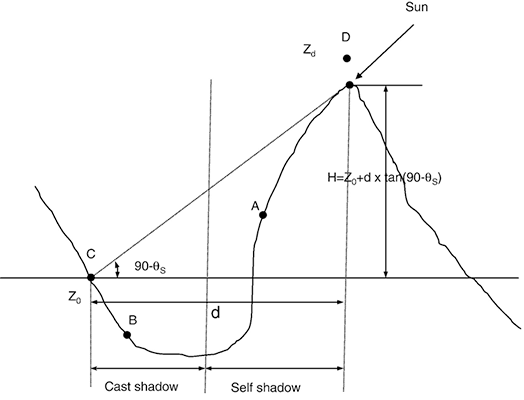
Figure 5. Different types of terrain-shaded pixels. C = point of interest; D = point located along the direction of the sun; 90-θS = solar zenith; Z0 = elevation at location C; Zd = elevation at location D. Image sourced from Jupp et al. (2012).
Example - Fmask
Some analyses might want to exclude targets that are obscured by cloud or cloud shadow. This is particularly useful for applications looking to harvest statistical information for particular regions of interest, such as field crops, where large swaths of data aren’t required to be loaded into computer memory. Instead, only the regions of interest are loaded, analysed and summarised, reducing computational costs.
The following images represent the surface reflectance image and derived Fmask classification result for visual context. The colours for the Fmask classification are displayed as:
Black = clear
Magenta = cloud
Yellow = cloud shadow
Cyan = snow
Dark blue = water.
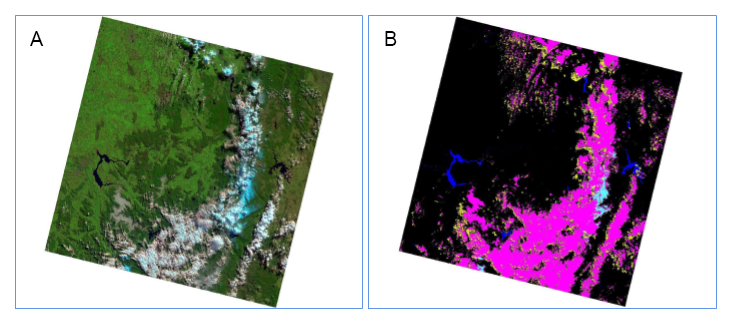
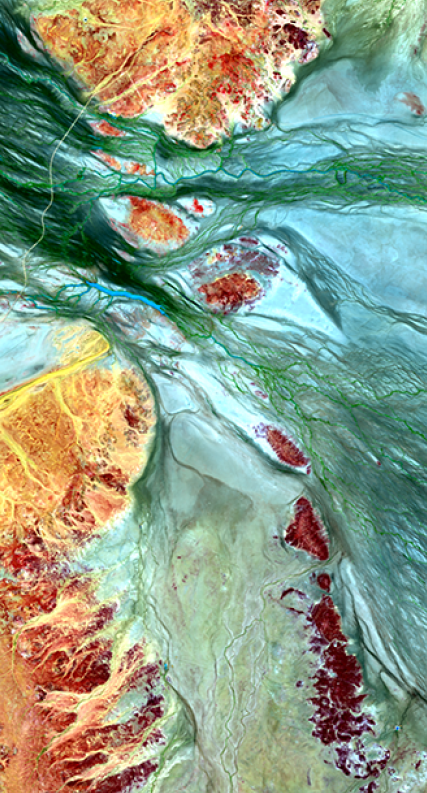
Figure 6. (A) False colour composite; (B) the resulting Fmask classification.
For this product, the Fmask dataset has had the object dilation for the cloud and cloud shadow layers removed. This enables you to customise object dilation to meet your needs for specific applications. For example, one application might work better having a 7-pixel dilation, whereas another might require 5.
You can also choose your own kernel shape and size in which to apply a particular dilation. Dilation can be useful for filling holes within objects and extending the edges of detected objects. It is important to note that small objects (e.g. 1 or 2 pixels in size) will be dilated and become large objects. If this is an undesired outcome, it is best to filter out any small objects prior to applying dilation filters.
For more information on dilation, see:
Other uses of Fmask:
For training data for use with machine learning classifiers Fmask can help refine the result and produce a more accurate classification result. The data can also be combined with other classifiers, creating a confidence metric that users can then filter by. For example, you can filter cloud pixels rated >70% as a combined metric from the combination of cloud classifiers.
For input into a statistical summary It can provide another information product that can be used to indicate the probability of being a particular classified feature. For example, a statistical summary of cloud and/or cloud shadow can highlight pixels that are consistently being detected as a cloud or cloud shadow. As clouds and cloud shadows are non-persistent features, pixels with a high cloud or cloud shadow frequency can be labelled or attributed as highly probable of not being cloud or cloud shadow.
Image format specifications
Fmask
Format |
GeoTIFF |
Resolution |
30m |
Datatype |
UInt8 |
Classification ENUM |
0 = null |
Valid data range |
[0,5] |
Tiled with X and Y block sizes |
512x512 |
Compression |
Deflate, Level 9, Predictor 2 |
Pyramids |
Levels: [8,16,32] |
Contrast stretch |
None |
Output CRS |
As specified by source dataset; source is UTM with WGS84 as the datum |
nbar-contiguity, nbart-contiguity
Format |
GeoTIFF |
Resolution |
30m |
Datatype |
UInt8 |
Classification ENUM |
0 = non-contiguous (spectral information not present in each band) |
Valid data range |
[0,1] |
Tiled with X and Y block sizes |
512x512 |
Compression |
Deflate, Level 9, Predictor 2 |
Pyramids |
Levels: [8,16,32] |
Contrast stretch |
None |
Output CRS |
As specified by source dataset; source is UTM with WGS84 as the datum |
combined-terrain-shadow
Format |
GeoTIFF |
Resolution |
30m |
Datatype |
UInt8 |
Classification ENUM |
0 = terrain shadow |
Valid data range |
[0,1] |
Tiled with X and Y block sizes |
512x512 |
Compression |
Deflate, Level 9, Predictor 2 |
Pyramids |
None |
Contrast stretch |
None |
Output CRS |
As specified by source dataset; source is UTM with WGS84 as the datum |
incident, exiting, azimuthal-incident, azimuthal-exiting, relative-azimuth, relative-slope, timedelta
Format |
GeoTIFF |
Resolution |
30m |
No data value |
NaN (IEEE 754) |
Tiled with X and Y block sizes |
512x512 |
Compression |
Deflate, Level 9, Predictor 2 |
Pyramids |
None |
Contrast stretch |
None |
Output CRS |
As specified by source dataset; source is UTM with WGS84 as the datum |
Processing steps
Accuracy
For information on the accuracy of the algorithms for test locations, see Zhu and Woodcock (2012) and Zhu, Wang and Woodcock (2015).
Limitations
Fmask
Fmask has limitations due to the complex nature of detecting natural phenomena, such as cloud. For example, bright targets, such as beaches, buildings and salt lakes often get mistaken for clouds.
Fmask is designed to be used as an immediate/rapid source of information screening. The idea is that over a temporal period enough observations will be made to form a temporal likelihood. For example, if a feature is consistently being masked as cloud, it is highly probable that it is not cloud. As such, derivative processes can be created to form an information layer containing feature probabilities.
Edges and fringes of clouds tend to be more opaque and can be missed by the cloud detection algorithm. In this instance, applying a morphological dilation will grow the original cloud object and capture edges and fringes of clouds. However, it is important to note that other cloud objects could also be dilated. Be mindful of single-pixel objects that could grow to become large objects. Consider filtering out these small objects prior to analysis.
Angular measurement and shadow classification
The Digital Elevation Model (DEM) is used for identifying terrain shadow, as well as producing incident and exiting angles. It is derived from the Shuttle Radar Topography Mission (SRTM) and produced with approximately 30 m resolution. As such, any angular measurements and shadow classifications are limited to the precision of the DEM itself. The DEM is known to be noisy across various locations, so to reduce any potential extrema, a Gaussian smooth is applied prior to analysis.
Quality assurance
The authors evaluated the Fmask algorithm using a total of 188 randomly selected Worldwide Reference System (WRS) locations across nine latitudinal zones. From these locations, 212 Landsat scenes were used as a reference set as part of the accuracy assessment. The average accuracy for cloud detection was 96.4%.
The calculation of the satellite and solar positional geometry datasets are largely influenced by the publicly available ephemeris data and whether the satellite has an on-board GPS, as well as the geographical information that resides with the imagery data and the metadata published by the data providers. The code to generate the geometry grids is routinely tested and evaluated for accuracy at >6 decimal places of precision.
The technical report containing the data summary for the Phase 1 DEA Surface Reflectance Validation is available: DEA Analysis Ready Data Phase 1 Validation Project : Data Summary
Product ID
The Product ID is ga_ls9c_ard_3. This ID is used to load data from the Open Data Cube (ODC), for example dc.load(product="ga_ls9c_ard_3", ...)
Bands
Bands are distinct layers of data within a product that can be loaded using the Open Data Cube (on the DEA Sandbox or NCI) or DEA’s STAC API. Note that the Coordinate Reference System (CRS) of these bands is Multiple UTM zone CRSs.
Type |
Units |
Resolution |
No-data |
Aliases |
Description |
|
|---|---|---|---|---|---|---|
oa_fmask |
uint8 |
Classification |
30 |
0 |
fmask
|
Fmask: A categorical classification layer produced using the automated Fmask (‘Function of mask’) algorithm, used to mask out unwanted observations in satellite imagery (e.g. cloud or shadow). Classification values: |
oa_nbart_contiguity |
uint8 |
Classification |
30 |
255 |
nbart_contiguity
|
NBART contiguity: A layer indicating whether each pixel is ‘spectrally contiguous’, meaning that it contains valid observations in every spectral band. Classification values: |
oa_azimuthal_exiting |
float32 |
Degrees |
30 |
NaN |
azimuthal_exiting
|
Azimuthal exiting: The angle between true north and the exiting direction in the slope geometry. |
oa_azimuthal_incident |
float32 |
Degrees |
30 |
NaN |
azimuthal_incident
|
Azimuthal incident: The angle between true north and the incident direction in the slope geometry. |
oa_combined_terrain_shadow |
uint8 |
Classification |
30 |
255 |
combined_terrain_shadow
|
Combined terrain shadow: Terrain shadow. Classification values: |
oa_exiting_angle |
float32 |
Degrees |
30 |
NaN |
exiting_angle
|
Exiting angle: The angle between a ray reflected from a surface and the line perpendicular to the surface at the point of emergence. |
oa_incident_angle |
float32 |
Degrees |
30 |
NaN |
incident_angle
|
Incident angle: The angle between a ray incident on a surface and the line perpendicular to the surface at the point of incidence. |
oa_relative_azimuth |
float32 |
Degrees |
30 |
NaN |
relative_azimuth
|
Relative azimuth: The relative azimuth angle between the sun and view directions. |
oa_relative_slope |
float32 |
Degrees |
30 |
NaN |
relative_slope
|
Relative slope: The relative azimuth angle between the incident and exiting directions in the slope geometry. |
oa_satellite_azimuth |
float32 |
Degrees |
30 |
NaN |
satellite_azimuth
|
Satellite azimuth: The angle of the satellite’s position from true north; i.e. the angle between true north and a vertical circle passing through the satellite and the point being imaged on Earth. |
oa_satellite_view |
float32 |
Degrees |
30 |
NaN |
satellite_view
|
Satellite view or satellite zenith: The angle between the zenith and the satellite. (The zenith is the point in the sky or celestial sphere directly above the point being imaged on Earth.) |
oa_solar_azimuth |
float32 |
Degrees |
30 |
NaN |
solar_azimuth
|
Solar azimuth: The angle of the sun’s position from true north; i.e. the angle between true north and a vertical circle passing through the sun and the point being imaged on Earth. |
oa_solar_zenith |
float32 |
Degrees |
30 |
NaN |
solar_zenith
|
Solar zenith: The angle between the zenith and the centre of the sun’s disc. |
oa_time_delta |
float32 |
Seconds |
30 |
NaN |
time_delta
|
Timedelta: The time from satellite apogee (the point of orbit at which the satellite is furthest from the Earth). |
Product information
This metadata provides general information about the product.
Product ID |
ga_ls9c_ard_3
|
Used to load data from the Open Data Cube. |
Short name |
DEA Surface Reflectance OA (Landsat 9) |
The name that is commonly used to refer to the product. |
Technical name |
Geoscience Australia Landsat 9 OLI-TIRS Observation Attributes Collection 3 |
The full technical name that refers to the product and its specific provider, sensors, and collection. |
Version |
3.0.0 |
The version number of the product. |
Lineage type |
Baseline |
Baseline products are produced directly from satellite data. |
Spatial type |
Raster |
Raster data consists of a grid of pixels. |
Spatial resolution |
15-30 m |
The size of the pixels in the raster. |
Temporal coverage |
31 Oct 2021 to Present |
The time span for which data is available. |
Coordinate Reference System (CRS) |
Multiple UTM zone CRSs |
The method of mapping spatial data to the Earth’s surface. |
Update frequency |
Daily |
The expected frequency of data updates. Also called ‘Temporal resolution’. |
Update activity |
Ongoing |
The activity status of data updates. |
Currency |
Currency is a measure based on data publishing and update frequency. |
|
Latest update date |
See Table A of the report. |
|
DOI |
The Digital Object Identifier. |
|
Catalogue ID |
The Data and Publications catalogue (eCat) ID. |
|
Licence |
See the Credits tab. |
Product categorisation
This metadata describes how the product relates to other products.
Collection |
|
Tags |
geoscience_australia_landsat_collection_3, analysis_ready_data, satellite_images, earth_observation, baseline_satellite_data, landsat |
Access the data
DEA Maps |
Learn how to use DEA Maps. |
|
DEA Explorer |
Learn how to use the DEA Explorer. |
|
Data sources |
Learn how to access the data via AWS. |
|
Code examples |
Learn how to use the DEA Sandbox. |
|
Web services |
Learn how to use DEA’s web services. |
Version history
No previous versions are available.
Acknowledgments
This research was undertaken with the assistance of resources from the National Computational Infrastructure (NCI), which is supported by the Australian Government.
Landsat level 0 and level 1 data courtesy of the U.S. Geological Survey.
The authors would like to thank the following organisations:
National Aeronautics and Space Administration (NASA)
Environment Canada
The Commonwealth Scientific and Industrial Research Organisation (CSIRO)
National Oceanic and Atmospheric Administration (NOAA) / Earth System Research Laboratories (ESRL) / Physical Sciences Laboratory (PSD)
The National Geospatial-Intelligence Agency (NGA)
The United States Geological Survey (USGS) / Earth Resources Observation and Science (EROS) Center
Spectral Sciences Inc.
License and copyright
© Commonwealth of Australia (Geoscience Australia).
Released under Creative Commons Attribution 4.0 International Licence.